圖2-43是國產JRO-40型熱繼電器的外形和結構原理圖。它由雙金屬片1和2,熱元件一一電阻絲3-4、5-6以及觸點系統組成。雙金屬片是用兩層膨脹系數相差較大的金屬片牢固地軋焊在一起做成。使用時,應將兩組熱元件與電動機的兩條電源進線串聯。電動機工作時,電流通過熱元件使雙金屬片加熱。由于雙金屬片的左右兩層膨脹系數不同,圖中未涂黑的那層金屬比涂黑的那層膨脹系數大,上端又是固定著的,因此雙金屬片就向右彎曲。它通過滑桿7和人字形的撥桿8而頂向動觸片31。電動機在額定負載下工作時,雙金屬片給動觸片的推力并不足以克服彈簧10對動觸片的拉力,因此觸點31-32(常閉觸點)仍處于原來的閉合狀態。
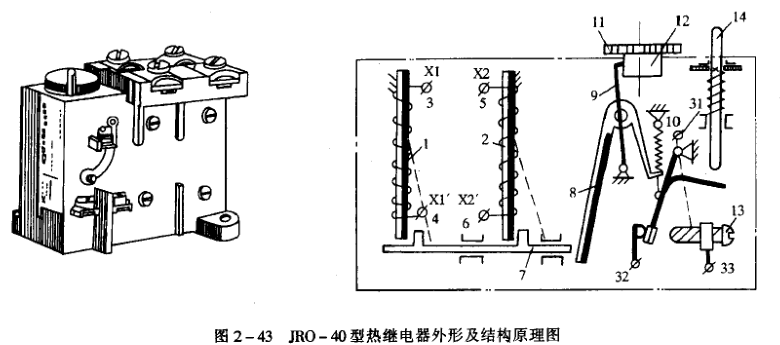
如果電動機過載,電動機的工作電流就比額定值大,熱元件所發出的熱量就比平時增多,這一段時間,雙金屬片就顯著彎曲了。當這一彎曲力一旦超過彈簧的拉力時,動觸片31就擺到右邊,與靜觸點32分斷。這樣,就能使控制電動機的接觸器斷電釋放,電動機也就斷電停止運行,起到過載保護的作用。
電動機被斷電后,雙金屬片就逐漸散熱冷卻。經過一段時間,動觸片在彈簧的拉力下又擺回原位,使動斷觸點31-32自動閉合。除上述自動復位方式外,還可用手動復位方式。這時,應將螺釘13向外擰到極端位置。這樣,過載動作后,動觸片就向右擺到新的平衡位置,要使動和觸片重新返回原位,就必須按動一下復位按鈕14。